
踩油门和刹车是需要机器人做出快速响应的,例如在红绿灯状态下的启动和刹车,以及在前方有行人时的刹车。研究者采用离线学习的方式来训练机器人的动态响应。

踩油门训练
在识别部分,像人类驾驶员一样,研究者主要利用机器学习训练识别了视觉和声音信息,通过训练,可以识别物体信息和声音信息,例如,汽车,人,交通灯,以及喇叭声等。研究者进行测试的场地是在车人非常稀少的街道上。
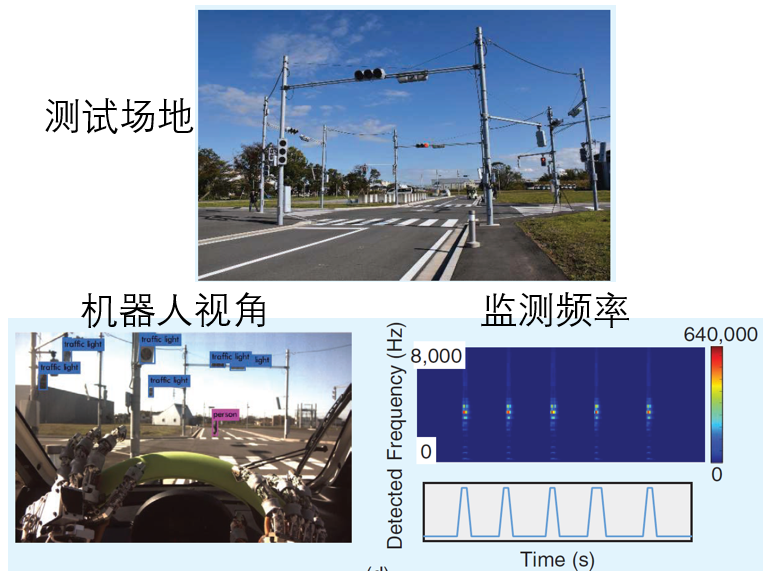
测试场地和机器人视觉识别
Musashi驾驶一辆小型改装的电动车进行试验。其中,能源和计算机控制中枢都被安装于车厢尾部,另外还包括一个无线通讯模块。为了安全起见,该车辆的电机扭矩被限制在5Nm之内,同时有一个应急按钮以防止出危险。

驾驶汽车上配置电源和计算机
Musashi可以通过简单的反射弧控制算法来对外界做出反应。研究者展示了一个很经典的场景,即在车辆前方有人或者汽车通过时,快速踩下刹车做出反应。基于Musashi的识别系统,它可以有效地识别在前方通过的人,以及即将到来的汽车,并做出反应。研究者指出,为了让机器人的控制系统更加智能,在更多的环境中去训练机器人的识别模型时非常有必要的。

驾驶过程中的鸣笛声或者人类检测
另一个测试场景是让Musashi自动驾驶通过一个有着红绿灯的十字路口。在这项实验中,Musashi的驾驶速度非常的缓慢(5km/s)。当十字路口的等变为绿色时,操作人员对机器人发出转弯的指令,Musashi可以驾驶小车用双手实现90度的转弯。整个过程持续大约2分钟,相对来说比较缓慢和不流畅。

驾驶过程中的红绿灯检测
三. 总结与未来展望
虽然自动驾驶汽车要比用“人形机器人”驾驶汽车更为可靠,更舒适,更安全,但是小编相信,对于“人形机器人“的诸如此类的深入研究还是有很重要和深远意义的。驾驶汽车这项任务将机器人束缚在一个极其复杂的环境中,需要机器人去操作方向盘,踩油门,拉手刹,拨转向灯等。无疑来说是一项很有挑战性的任务。进行相关的研究可以极大的促进”人形机器人“的发展。
本文的研究者指出,当前的研究还有很多方面需要改进,例如在脚踏板的操作和方向盘的操作方面,都不够顺滑,以及速度较慢,远远没有办法和人类进行比较。同时机器人的识别模型还需要进一步的完善和强化,以适应更复杂的环境。在未来的研究中,研究者会考虑让机器人尝试不同的汽车,从而进一步提升人形机器人的性能。
相关论文信息:
Kawaharazuka, K., Tsuzuki, K., Koga, Y., Omura, Y., Makabe,T., Shinjo, K.,Kawasaki, K. (2020). Toward Autonomous Driving byMusculoskeletal Humanoids: Study of Developed Hardware and Learning-BasedSoftware. IEEE Robotics & Automation Magazine.
东京大学人形机器人论文:
Asano, Y., Okada, K., & Inaba, M. (2017). Designprinciples of a human mimetic humanoid: Humanoid platform to study humanintelligence and internal body system. Science Robotics, 2(13),eaaq0899.


