

变刚度手臂
为了尽可能的模仿人类驾驶员的特性,研究者没有采用3d扫描传感器,而是在Musashi的头部具有两只可动2维摄像机充当眼睛,可以左右和上下旋转,主要作用是采集图像信息用于识别。
Musashi的手指采用弹簧柔性结构设计。当两边线都收紧式,手指处于大刚度状态。这款机械手在冲击下不会被损坏,另外在指尖部位和手掌部分都有用来检测接触的压力传感器。
Musashi的足部有着6维力传感器,分别分布在脚趾和脚后跟处,可以全面感知脚受到的力的大小和方向。
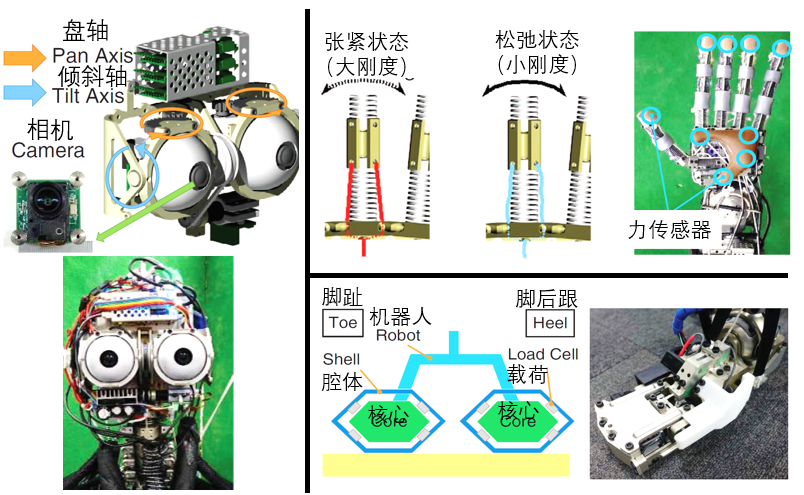
细节设计:眼部设计,变刚度机械手,足部传感
借助于高度拟人化的硬件设计,Musashi可以实现以下功能和动作。首先它可以完美的坐到一部小型家用电动车中。可以通过头部和眼球的转动识别周围的环境,例如通过后视镜的反射可以识别人类;柔性机械臂和机械手可以抓握方向盘并且进行转向操作。

基本动作和功能:后视镜人像识别和双手转方向盘
另外Musashi也可以完成例如拧车钥匙,以及拉手刹等在驾驶过程中一些必备的,看似简单,实际对大多数机器人来说比较难以在狭小空间完成的基本动作。
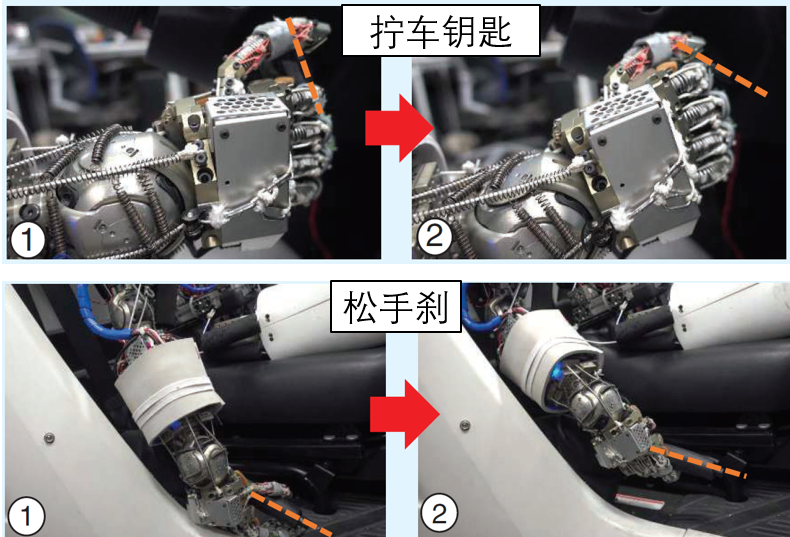
基本动作:拧车钥匙和拉手刹
借助于足部的传感器和腿的设计,Musashi可以实现踩油门和踩刹车的功能。另外当足部上方被刹车油门卡住后,力传感器可以检测出,从而让Musashi做出反应,避开刹车油门的干扰。

基本动作:踩油门,踩刹车
在具备了柔性的身体结构和冗余传感信息,为了实现机器人驾驶汽车的功能,研究者们采用一种基于机器学习(learning based)的运动生成,基于机器学习的识别,以及基于快速反射弧的控制方法,详细的机器学习算法请参照具体论文。
研究者规定了一些基本的驾驶汽车的动作,将他们分为两种类别,静态行为和动态行为。静态行为指的是转方向盘,研究者用在线学习的方式,训练机器人掌握操作方向盘的行为,图中显示出了方向盘角度和肌肉张力随着时间的变化规律。
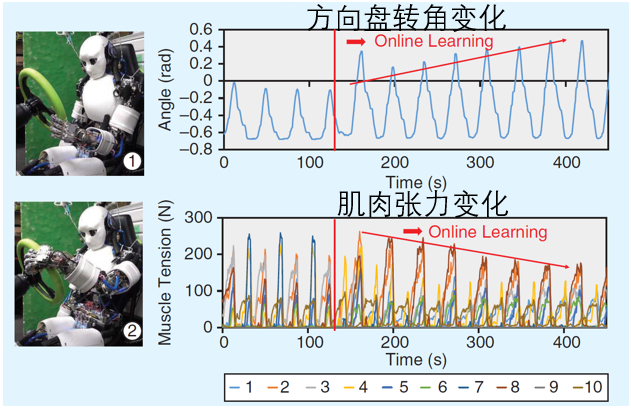
转方向盘在线机器学习


