
07精锋医疗专利分析
如此高科技含金量的公司,专利有多少?
目前,精锋医疗在全球共有超过430项获授专利及专利申请。
在中国有201项获授专利,包括76项发明专利、89项实用新型专利及36项外观设计专利,在中国亦有209项专利申请正在审批,在国外(包括欧洲、美国、日本、韩国、巴西及印度等国家)有13项专利合作条约(PCT)国际申请及15项专利申请。
这公司在申报材料里表示,公司中国的专利授权及专利申请数量均在中国手术机器人公司中排名第一。
从专利布局看,精锋医疗当前的专利主要集中于手术机器人、操作设备、操作臂、手术器械、动力机构、驱动装置、末端执行器等相关的核心技术领域。

(与公司的业务经营有重大关系的专利)
08全球手术机器人专利分析
看看全球手术机器人玩家有多少?
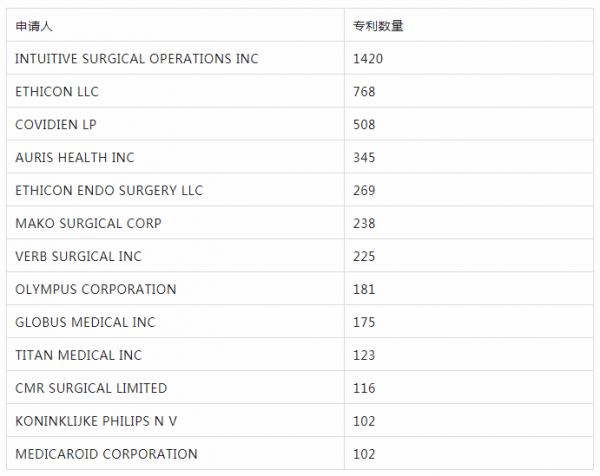
以手术机器人为关键词,在德高行全球专利数据库检索得出,相关专利申请人排名如下:

深圳市精锋医疗科技有限公司排第二,第一的是直观外科手术操作公司。
直观外科手术操作公司就不多说了,达芬奇系列是他家产品。
简单科普2句,IntuitiveSurgical(直觉外科公司)是一家美国的医疗技术公司,开发和制造机器人辅助手术的机器人产品。
它的旗舰产品是一款名为“daVinci(达芬奇)”的机器人系统。
达芬奇已经是一个非常完善的机器人系统,主要用于泌尿和妇科手术。
到2019年底,直觉外科公司已经售出了超过5500台达芬奇机器人系统,帮助了医疗机构进行了超过700万例手术。
直觉外科公司的另一款主打产品是离子机器人系统(Ionroboticsystem),用于机器人辅助支气管镜检查或活检。
公司大量专利也都围绕计算机辅助远程操作手术系统、手术机械臂、图像引导、机械肘、仿真模型、内窥镜、微创切割等专利。
这些专利都在计算机辅助外科学、专门适用于外科的操纵器或机器人这一大概念下。
排名第三的柯惠LP公司(CovidienLp)也是一家美国老牌医疗企业,经营医疗器械。从专利分布看,柯惠公司的专利技术研发重点主要集中在医学诊断与外科领域。
在德高行全球专利数据库里,国外手机机器人专利申请人排名如下:
上表内的都是手术机器人行业的大佬,想抄作业就对准人家公司最新产品去!
知情郎分享几个行业TOP企业的经典专利。
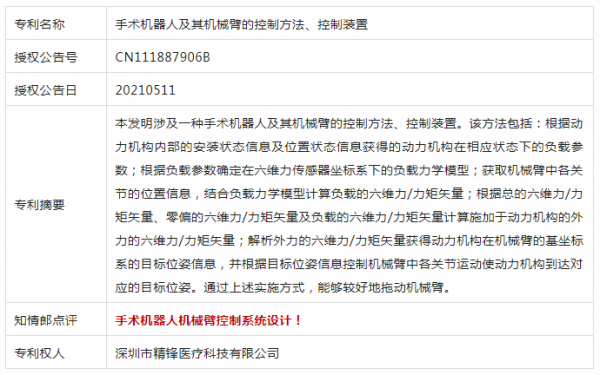
09机械臂控制办法
背景技术
微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。
随着科技的进步,微创手术机器人技术逐渐成熟,并被广泛应用。微创手术机器人通常包括主操作台及从操作设备,主操作台包括手柄,医生通过操作手柄向从操作设备发送控制命令,从操作设备包括机械臂,机械臂远端具有操作臂,操作臂具有末端器械。医生对患者实施手术操作之前,需要拖动机械臂以使其远端能够运动至医生规划的患者手术入口部位的期望位姿。
然而,在拖动机械臂至规划位置时,由受力位置远端的结构导致的负载情况由于具有不确定性,导致不能准确地确定操作者所施加的外力,存在拖动手感与操作者意图差距较大、跟随性较差的问题。
发明内容
基于此,有必要提供一种能够较好地拖动动力机构的手术机器人及其控制方法、计算机可读存储介质。
一方面,本发明提供一种手术机器人中机械臂的控制方法,包括:
根据动力机构内部的安装状态信息及位置状态信息获得的动力机构在相应状态下的负载参数,负载参数包括质量参数和质心参数;
根据负载参数确定在六维力传感器坐标系下、由动力机构导致的负载对应的负载力学模型;
获取机械臂中各关节的位置信息,结合负载力学模型计算负载的六维力/力矩矢量;
获取零偏的六维力/力矩矢量及总的六维力/力矩矢量;
根据总的六维力/力矩矢量、零偏的六维力/力矩矢量及负载的六维力/力矩矢量计算施加于动力机构的外力的六维力/力矩矢量;
解析外力的六维力/力矩矢量获得动力机构在机械臂的基坐标系的目标位姿信息,并根据目标位姿信息控制机械臂中各关节运动使动力机构到达对应的目标位姿。
另一方面,本发明提供一种手术机器人的控制方法,所述手术机器人包括机械臂,所述机械臂具有多个通过关节连接的连杆,作为所述机械臂远端的所述连杆是动力机构。
本发明具有如下有益效果:
通过准确确定受力部件远端结构导致的负载的负载参数,有利于准确确定负载的六维力/力矩矢量,能够准确确定受力部件所受外力的六维力/力矩矢量,进而有助于根据外力精准地对受力部件进行拖动,其拖动手感好、跟随性优良。