
从最早的超声波定位和随机碰撞定位到如今的激光SLAM定位,智能扫地机器人上的环境感知技术变得越来越强大,其机身尺寸也在不断朝着小型化的方向发展。目前,在成熟的激光导航等技术的加持下,扫地机器人已经能够自主完成房间的内部建模,从墙壁到大家具的位置都能准确扫描,丝毫不用担心有一丝疏漏。

不过尽管如此,扫地机器人对于一些小物件,却依然无能为力。
像地面上随意乱扔的玩具、画册;又或者地面上杂乱的电线和插座。他们足够小,所以激光扫描器很少会将它们视作障碍,并且足够轻,在接触时碰撞传感器也不会生效。结果也可想而知,扫地机器人会“粗暴”地在这些物体间横冲直撞,最后无论是家中的小物件还是扫地机器人本身都会收到损伤。
要想解决小物件的识别问题,借助激光,会导致成本和设备的体积大大增加,因此,就有了借助已有的视觉系统分析技术,如面部识别、虹膜和手势监控、对象和自由空间检测、行为识别等,解决这一难题的想法。为扫地机器人加上“一双眼睛”的设计,也由此而生。

前些时间发布的石头T7 Pro就是如此,让智能视觉技术加持在了传统的激光SLAM机器人上,当然,其SLAM部分仍然是由激光承担,视频功能用以AI识别。
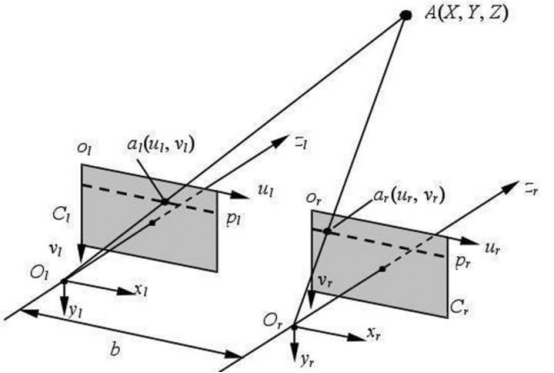
视觉识别系统通常来说可以包括一个或两个摄像头。单一的照片只具有二维信息,犹如2D电影,并无直接的空间感,只有靠我们自己依靠“物体遮挡、近大远小”等生活经验脑补,故单一的摄像头获取到的信息及其有限,并不能直接得到我们想要的效果。
类比到机器视觉中,单个摄像头的图片信息无法获取到场景中每个物体与镜头的距离关系,即缺少第三个维度。
单一的图片具有很强的迷惑性和不确定性,尤其是现实生活中的场景极度复杂,单个摄像头发生视觉误算的概率非常大,可能会计算错物体的实际距离。所以这便需要扫地机器人从单个摄像头升级到两个摄像头,即立体视觉,直接提供第三个维度的信息,也就是景深信息。
对单目来说,要想获得距离信息,必须先识别目标:单目测距和 3D 估计靠的是检测目标的 Bounding Box(BB),对于未识别的物体,该系统就无法估计其距离,比如如果闭着一只眼睛,对于不认识的的东西是没办法估计其大小和距离的。
很多传统的激光SLAM扫地机器人主要判定障碍物的方式还都是通过红外或超声波扫描传感器,可以识别比较大的障碍物,但并不知道障碍物是什么,这就出现了一个问题——什么障碍物需要躲避,什么障碍物可以越过无法判断。
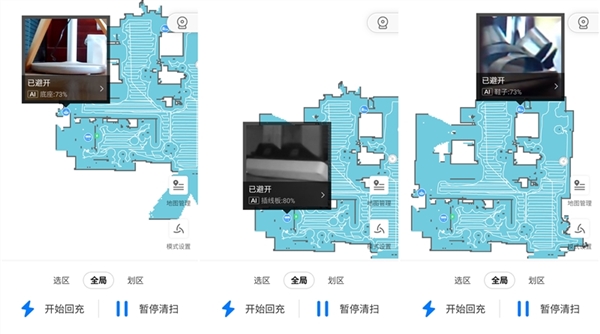
这些问题,对于石头扫地机器人T7 Pro来说都可以轻松做到。通过前置的AI双摄,利用视觉识别技术,可以像人眼睛样识别障碍物。这不仅仅局限于日常常见的规则物体,甚至连宠物的粪便都可以被AI所认出,这样机器人在清扫时就可以提前预警,远远地绕行避开。
对于家中的日常生活用品,搭载双目识别系统的石头扫地机器人T7 Pro也能实现准确的识别并避开小型障碍物。在家中进行一轮清理,行进过程中碰到的物体都被识别并记录了下来,准确度也很有保证。
此外,即使是夜间,也不用担心石头扫地机器人T7 Pro的双目视觉识别系统能否正常工作。石头扫地机器人T7 Pro配备了一套RGB+IR双通滤波片,在白天的强光下,红外补光灯关闭,摄像头内部的传感器主要接受可见光。夜晚,打开红外补光灯,保证黑暗环境中,传感器依然可以通过接受红外光成像。

即使夜晚漆黑环境中,也能准确识别对象
有了支持双目视觉识别的石头扫地机器人T7 Pro,就不用像仪式一般在使用扫地机器人前巡视一遍房屋,将地上的插线板、玩具、鞋子等清空,来避免对清扫产生干扰或是因为清扫而发生损坏。让扫地机器人有了”一双眼睛“之后,用户才能更好的享受生活,感受科技带来的便利,彻底解放自己的双手。