
我国水域辽阔,水下蕴藏着丰富的生物、文物等资源。目前人类对河流、湖泊及近浅海内水下生物、文物资源的采集主要是采用潜水员人工作业的方式。然而,潜水员平均水下作业时间为30分钟(轻潜)至2小时(重潜),作业深度通常在40米以内。长期的潜水作业会对潜水员的身体健康造成严重危害,导致皮肤、肌肉骨骼、神经系统、呼吸与循环系统等全身性疾病,俗称“潜水员病”。传统水下作业机器人多采用刚性抓持装置。水下刚性机械臂专为大负载、低柔性的作业而设计,较少地应用于水下生物活体、文物样本等采集作业。水下软体机械臂可以实现柔性安全的抓持目标物,同时具有轻质、低惯量等特性。这使得水下软体机械臂在抓取水下柔软易损、形状不规则的活体生物等目标物时相比刚性机械臂具有优势。同时,软体机器人具有较高的柔顺性,难以建立有效的逆运动学模型从而进行精确控制。如何设计、制造并控制可用于自然海洋环境的水下软体机械臂是一个挑战性问题。

水下活体海产品采集作业与水下软体机械臂作业系统
7月7日,北京航空航天大学文力教授团队与中科院自动化所喻俊志研究员团队合作在国际机器人权威期刊《The International Journal of Robotics Research》(IJRR)发表了最新的研究成果:“A Soft Manipulator forEfficient Delicate Grasping in Shallow Water: Modelling, Control, and Real-world Experiments”。该研究设计并制造可应用于近浅海自然环境的水下软体机械臂,并将对其建立运动学模型与逆运动学快速求解方法,实现实时运动学控制,最终实现近浅海自然环境中的水下抓取作业。
北航机械学院2016级硕士生龚哲元为该文的第一作者,实验室成员方玺、程嘉辉、谢哲新、刘嘉琦、陈博瀚、杨辉、郝雨飞共同参与到样机的设计、制作和水下实验中,中科院自动化所陈星宇、孔诗涵参与了水下视觉反馈和水下实验。北航王田苗教授和中科院自动化所喻俊志研究员参与项目论证与讨论。北航为唯一通讯单位。
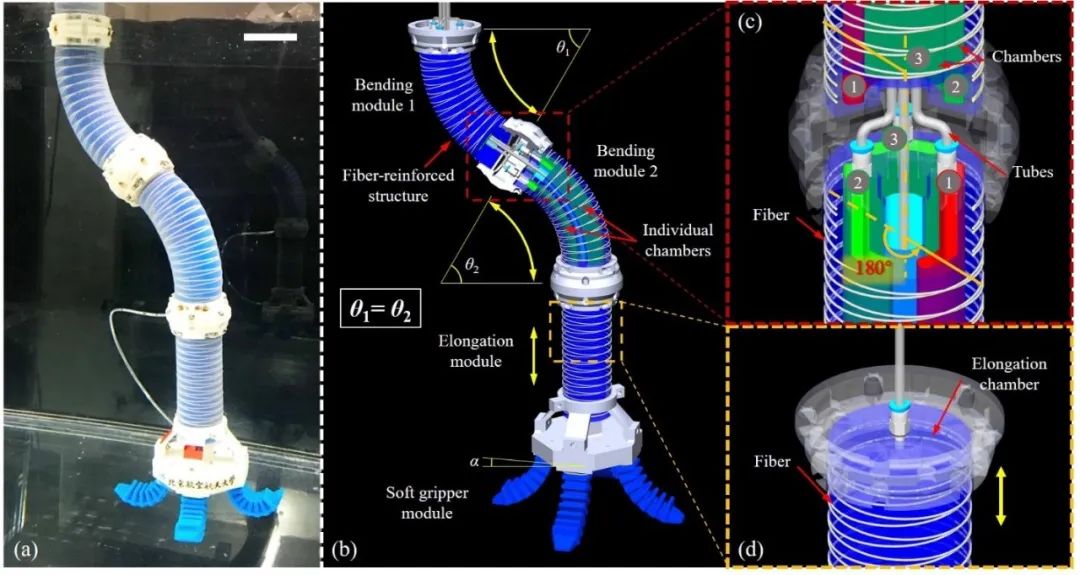
水下软体机械臂反向等曲率+伸长(OBSS)结构
为解决软体机器人连续臂逆运动学模型的快速求解,该研究提出了:1)反向等曲率PCC模型+伸长(OBSS)结构的软体机械臂结构,该结构提供了一种有效的的连续软体臂的机械降阶方式;2)基于反向等曲率模型的逆运动学快速求解方法。该方法可通过软体机械臂工作空间快速求得构型空间,并结合实验与离线仿真数据实现构型空间到驱动空间的快速求解。该逆运动学求解方法具有快速性,可以实现水下软体机械臂的定点位移和三维路径的轨迹规划,而求解时间仅为8.2ms。高效的求解效率也为软体机械臂的实时运动学控制奠定了基础,结合基于双目/手部相机的水下立体视觉系统,探索了基于逆运动学快速求解方法的水下视觉伺服控制。通过水下图像质量增强、目标检测与跟踪算法,在实验室环境下实现了视觉反馈的闭环目标抓取。
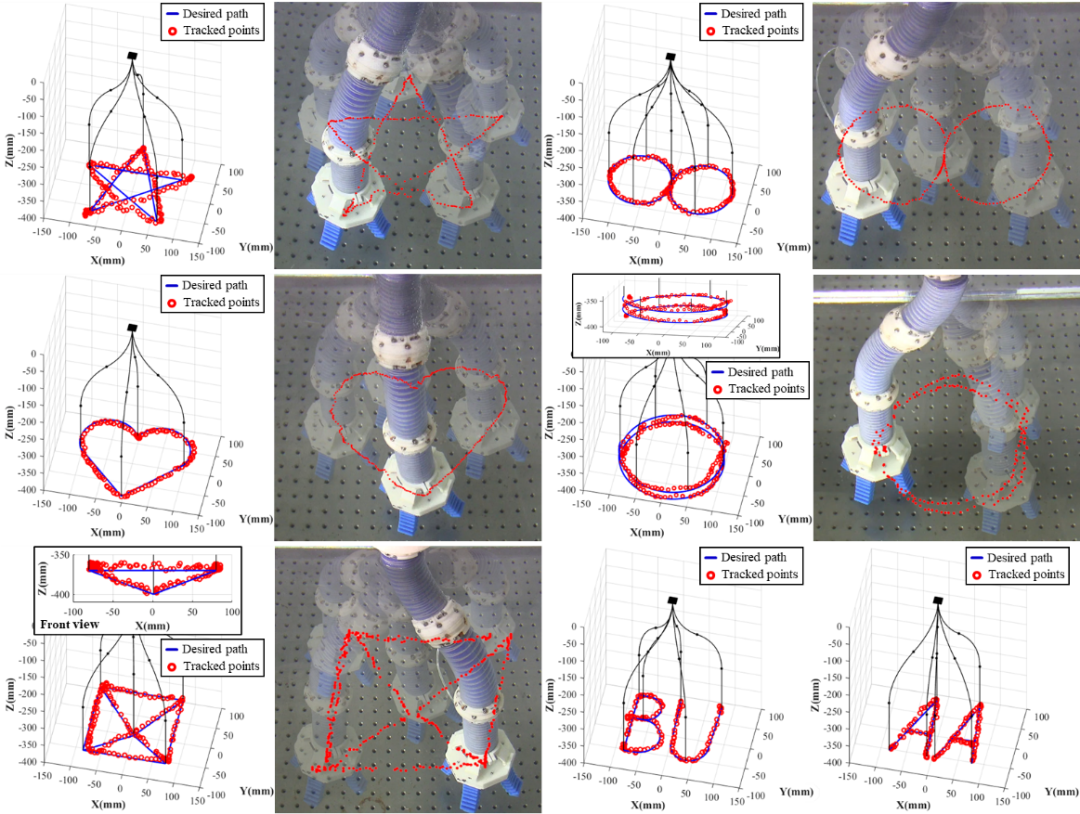
软体机械臂轨迹跟踪