
一方面,从随机清扫发展到陀螺仪导航再发展到激光SLAM,扫地机器人发展的短短时间当中就已经进行了多次的技术升级。然而,随着激光导航技术的业已成熟,同质化时代无可避免的来临,产品之间的差异化越来越小。
另一方面,目前,AI领域的许多研究集中于从视觉系统中分析图像的能力,如面部识别、虹膜和手势监控、对象和自由空间检测、行为识别等,并在过去几年中于智能家居领域收获了较大成功。
据市场研究公司Yole预测,到2025年,AI市场将以50%的年复合增长率(CAGR)增长,收入主要集中在使用智能视觉技术上。而从扫地机器人扫地机器人逐渐转向“视觉导航”、“自我感知”、“主动服务”的新方向来看,AI领域的发展成果现在便已经出现端倪。
前些时间发布的石头T7 Pro让智能视觉技术加持在了传统的激光SLAM机器人上,当然,其SLAM部分仍然是由激光承担,视频功能用以AI识别。

视觉识别系统通常来说可以包括一个或两个摄像头。单一的照片只具有二维信息,犹如2D电影,并无直接的空间感,只有靠我们自己依靠“物体遮挡、近大远小”等生活经验脑补,故单一的摄像头获取到的信息及其有限,并不能直接得到我们想要的效果。
类比到机器视觉中,单个摄像头的图片信息无法获取到场景中每个物体与镜头的距离关系,即缺少第三个维度。
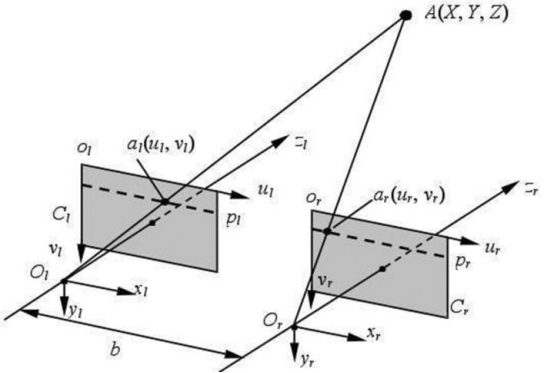
双目技术原理
单一的图片具有很强的迷惑性和不确定性,尤其是现实生活中的场景极度复杂,单个摄像头发生视觉误算的概率非常大,可能会计算错物体的实际距离。所以这便需要扫地机器人从单个摄像头升级到两个摄像头,即立体视觉,直接提供第三个维度的信息,也就是景深信息。
对单目来说,要想获得距离信息,必须先识别目标:单目测距和 3D 估计靠的是检测目标的 Bounding Box(BB),对于未识别的物体,该系统就无法估计其距离,比如如果闭着一只眼睛,对于不认识的的东西是没办法估计其大小和距离的。
很多传统的激光SLAM扫地机器人主要判定障碍物的方式还都是通过红外或超声波扫描传感器,可以识别比较大的障碍物,但并不知道障碍物是什么,这就出现了一个问题——什么障碍物需要躲避,什么障碍物可以越过无法判断。
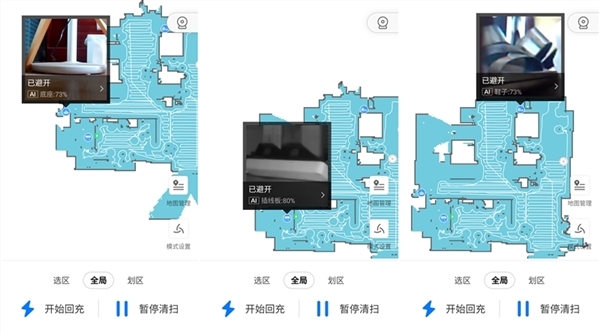
而石头扫地机器人T7 Pro可以通过前置的AI双摄,利用视觉识别技术,可以像人眼睛样识别障碍物。通过以上实测可以看到石头扫地机器人T7 Pro真的认出了“粑粑”,远远地绕行避开。
对于其它常见的杂物,石头扫地机器人T7 Pro也已经具备一定的识别能力,并且对不同障碍物采用不同的避障策略,评估避让距离,以兼顾清扫覆盖度和避障成功率:普通障碍物<鞋类/体重秤/吧台椅底座/风扇底座<插线板<一团电源线<粑粑(避障距离越来越大)。
而且,石头扫地机器人T7 Pro的视觉AI识别功能是支持全天候使用的,一旦遇到了光线昏暗的床下、桌下,以及没有开灯的房间,其依然能够正常使用,并且不会使用可见光打扰用户。
根据我们的了解,石头扫地机器人T7 Pro摄像头内部的IR-cut filter换成了RGB+IR双通的滤波片,白天强光下,红外补光灯不打开,摄像头内部的 Sensor 主要接收可见光;夜晚暗光下,红外补光灯自动打开,摄像头内部的 Sensor 主要接收红外光。这里我们实测了一下,石头扫地机器人T7 Pro在暗光环境当中其也能正常识别地板上凌乱的插线板。

红外补光,夜间AI识别
通过智能视觉技术的加持,石头扫地机器人T7 Pro脱离了传统激光SLAM机器人的范畴,解决了扫地机常常身陷卡困、误踩“雷区”的痛点,真正有了一双“眼睛”,同时红外摄像的加入让其能够实现全天候的工作,是其对扫地机器人产品及其形态的一个大胆尝试。