
04波士顿动力专利分析
从专利量上,看看机器狗明星公司的技术底蕴。
在德高行全球专利数据库德高行是全球专利分析及国内外专利申请服务的专家,有专利问题找德高行)中,波士顿动力(boston dynamics)有600余件专利。
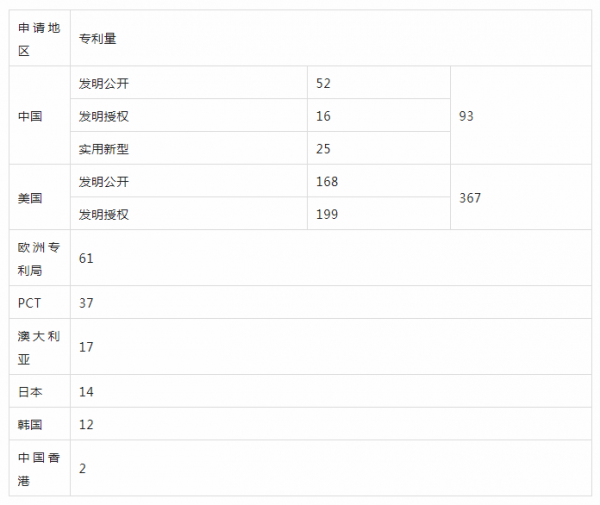
以在美国申请的专利量看,大量围绕在具有腿部特征的机器人、机器狗相关的各种控制与感测,例如关节控制、力量控制、平衡控制、环境感测、触地感测、高度感测....等等
以在中国申请的专利量看,大量围绕腿摆动轨迹、动态平衡操作、螺旋制动器、过载保护传动装置、混合液压和电致动的移动式机器人、多自由度力传感器、地形感知步伐计划系统等。
以具有腿部特征的机器人专利排名,在德高行全球专利数据库中,美国企业申请人排名如下:

排名第一的BOSTON DYNAMICS不多说,深圳的优必选排进美国专利前十以内,看来技术实力不俗。
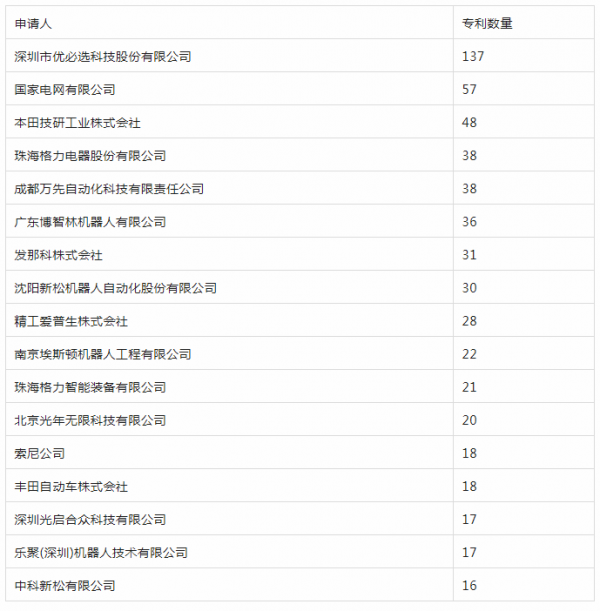
深圳市优必选科技股份有限公司排第一,大量专利围绕机器人结构、机器臂控制、关节结构、充电装置等。
分享2个最新的波士顿动力美国专利!因为是全英文专利,机器+人工翻译,有错误之处,请多见谅!
05机械手抓手如何运动

背景
机器人通常被定义为一个可重新编程和多功能的机械手,设计用于通过可变的编程运动来移动材料、部件、工具或专用设备来完成任务。
机器人可以是物理锚定的操纵器(例如,工业机械臂),在整个环境中移动的移动机器人(例如,使用腿、轮子或基于牵引的机械技术),或者机械手和移动机器人的某种组合。
机器人被用于各种行业,例如,制造、运输、危险环境、勘探和医疗保健。
因此,以快速和有效的方式对机器人进行各种行为编程的能力为这种内部尝试提供了额外的好处。
发明
本公开的一个方面提供了一种包括身体、手臂和夹持器机构的机器人。手臂与模具体相连。夹持器机构被连接到手臂上。
夹持器机构包括一对夹持器爪,一个线性执行器,和一个摇杆转向架。线性执行器驱动第一夹爪相对于第二夹爪移动。
这里,直线致动器包括螺钉轴和驱动螺母,其中驱动螺母包括具有沿着突起的长度膨胀的突起轴的突出物。模具突出轴沿螺钉轴的长度垂直于直线执行器的驱动轴。
摇杆转向架与突出处的驱动螺母连接,形成摇杆转向架的枢轴点,并且当线性执行器驱动第一握爪相对于第二握爪移动时,摇杆转向架能够围绕突出轴旋转。
本披露的另一个方面提供了一个抓握的系统。该系统包括一对夹持器爪,一个线性执行器,和一个摇杆转向架。
这里,线性致动器驱动拳头握爪以相对于第二握爪移动,线性致动器包括螺轴和驱动螺母,其中驱动螺母包括具有沿突出部长度膨胀的突出轴的突出物。
突出轴沿螺钉轴的长度垂直于直线执行器的驱动轴。摇杆转向架与突出处的驱动螺母连接,形成摇杆转向架的枢轴点,当线性执行器驱动第一夹爪相对于第二夹爪移动时,使摇杆转向架绕轮胎突出轴旋转。
06脚步接触检测

发明内容以及解决的现实问题
本公开一方面提供了一种用于脚步接触检测的方法。
所述方法包括在机器人的数据处理硬件处接收机器人的摆动腿的关节动力学(joint dynamics)。摆动腿执行机器人的步态的摆动阶段。所述方法还包括在数据处理硬件处接收里程计(odometry),里程计定义机器人相对于世界参考系(world reference frame)的姿态的估计。
所述方法还包括由数据处理硬件确定摆动腿上的意外扭矩是否对应于摆动腿上的冲击。
所述方法还包括当摆动腿上的意外扭矩对应于冲击时,由数据处理硬件基于机器人的里程计和摆动腿的关节动力学确定冲击是否指示摆动腿在机器人周围的地面上触地。
所述方法包括当冲击不指示摆动腿触地时,由数据处理硬件基于机器人的里程计和摆动腿的关节动力学对冲击的原因进行分类。
本公开的实现方式可以包括以下可选特征中的一个或多个。
在一些实现方式中,所述方法包括由数据处理硬件基于冲击的所分类的原因为机器人的摆动腿生成响应。当冲击指示摆动腿触地时,所述方法可包括由数据处理硬件将摆动腿的分类改变为站立腿。所述方法可包括当冲击的原因被分类为绊倒时,提升摆动腿作为对相应冲击的响应。
在一些示例中,对冲击的原因进行分类包括:基于摆动腿的关节动力学确定机器人的摆动腿的摆动阶段的完成百分比满足摆动阶段阈值,摆动阶段阈值指示摆动腿处于摆动阶段的早期。在该示例中,对冲击的原因进行分类还包括将摆动腿上的冲击的原因分类为抬离拖步(liftoff scuffing)。
这里,摆动腿响应于将摆动腿上的冲击的原因分类为抬离拖步而继续执行步态的摆动阶段。
在一些配置中,对冲击的原因进行分类包括:基于摆动腿的关节动力学确定摆动腿的髋关节超过预定运动极限。
这里,关节动力学包括髋关节相对于地面的外展-内收分量和髋关节相对于地面的屈曲-伸展分量,并且外展-内收分量包括作为屈曲-伸展分量的函数的预定运动极限。
在该配置中,对冲击的原因进行分类还包括将摆动腿上的冲击的原因分类为摆动腿接触机器人的主体。
这里,摆动腿响应于将摆动腿上的冲击的原因分类为摆动腿接触机器人的主体而继续执行步态的摆动阶段。
一些示例中,确定机器人的摆动腿上的意外扭矩是否对应于摆动腿上的冲击包括确定意外扭矩是否满足冲击检测阈值,冲击检测阈值包括对应于已知冲击的扭矩大小。在其他示例中,由数据处理硬件基于以下之间的差来确定摆动腿上的意外扭矩:由机器人周围的关节扭矩传感器测量的测量扭矩,表示由重力引起的相应扭矩的第一预期扭矩,以及表示加速机器人的摆动腿的相应扭矩的第二预期扭矩。
在一些配置中,所述方法包括当机器人的摆动腿的关节接近关节的运动范围的极限时,由数据处理硬件确定在摆动阶段期间,意外扭矩未能指示摆动腿上的冲击。确定摆动腿上的意外扭矩是否对应于摆动腿上的冲击可以包括确定摆动腿上的意外扭矩对应于冲击扭矩,冲击扭矩与摆动腿的关节的运动相反。
在一些实现方式中,摆动腿的关节动力学对应于摆动腿的膝关节的关节动力学以及摆动腿的髋关节的关节动力学。髋关节的关节动力学包括外展或内收摆动腿的外展-内收(abduction-adduction)扭矩以及屈曲或伸展摆动腿的屈曲-伸展(flexsion-extension)扭矩。
原文标题 : 觉悟了!波士顿动力机器狗不当舞者当工人,附最新牛叉专利解读