
二、零件选用
在完成初步的概念设计以后,接下来就进入挑选所需装置与零件的阶段。需要选用的零件包含:驱动器、动力源、控制板、马达控制器和感知器等等。我们建议刚入门的的玩家,从驱动器开始挑选。例如直流马达、伺服机等。接下来,再选择可以和驱动器搭配的控制板及驱动器控制板,最后是感知器,像是摄影机、超声波测距仪等等装置。
※零件选用小提示:
1. 在选择驱动器时,要先确认机器人所需要的规格。像是力量输出、制动方式等。这类讯息可以由网络搜寻,以及从驱动器的规格书上找到。
2. 选用市面上普及的零件。由于在机器人制作的过程中,很常会遇到问题,而普及常用的的零件因为用户多,较容易由网站、社群、坊间书籍或玩家团体中获得支持。
3. 在动力来源部分,建议使用高电容量、并能维持输出1安培电流的充电电池。
三、机器人组装
在凑齐了所有需要的零件和装置之后,接下来我们将要把机器人制作出来。这个阶段主要着重在两个部分:机器人的骨架结构设计与制作,以及将所有零件和装置装配起来。
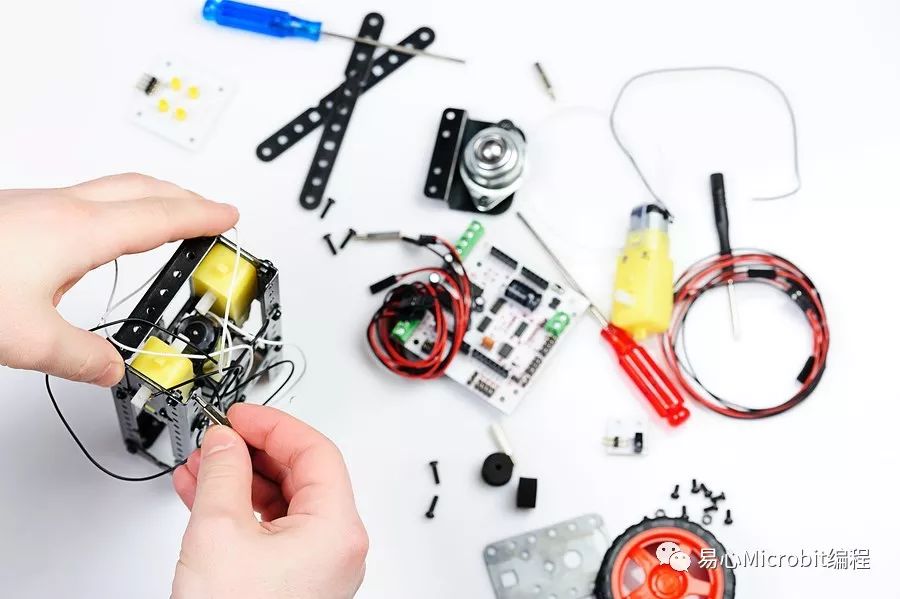
组装中的机器人
骨架结构的设计与制作看似直觉,却经常是制作机器人过程中最耗时费工的阶段。坊间有各式各样的材料可以选用,一如前文所提的KISS法则,尽量选择易获得、好加工又具有一定刚性的材料来制作结构体,像是瓦楞纸、木材、金属薄板或是3D打印等。如果可以,好好地应用3D绘图软件来协助设计,它可以帮助我们更直觉的看到最终成品的外观,也同时能够省下许多尝试错误的时间。
由于是入门机器人制作,这里暂时先不把工业产品设计的程序考虑进来,也就是「将脑中的雏型概念可视化、制图、制作样品,直到最终完成成品」这样的一个流程。同时,机器人的外观,在现阶段也先不用太过在意。
四、程控机器人
最后一个步骤,也是为机器人开光点眼、注入灵魂的关键步骤,就是将程序烧入机器人的芯片中。在完成这个步骤之前的机器人,我们只可以将它视为一台昂贵的玩具。要能完成这个步骤,有需要具备另一大块的技术能力——对机器人控制的知识,还有计算机程序编写的技能。这部分的知识可以从网站、社群和书籍中获得;市售的控制板一般也会提供人机软件接口,供开发者使用。

撰写程控机器人(来源:Fizzics Education)
结语:—千里之行,始于足下
上述的机器人制作步骤,是我们依据过去开发机器人的经验,并汇整其他玩家前辈心得所做出来的建议。相信您在成功完成了几次机器人的制作后,也会琢磨出一套最适合自己的机器人设计及制作流程。
然而,这些步骤流程无论看起来多么的言之有物,目的都是希望能协助我们更加顺利、更有效率的完成机器人的制作。所以最后、最终极,也是重要的步骤,就是马上拿出白纸,开始着手规画你的机器人!
作者:阿里哥